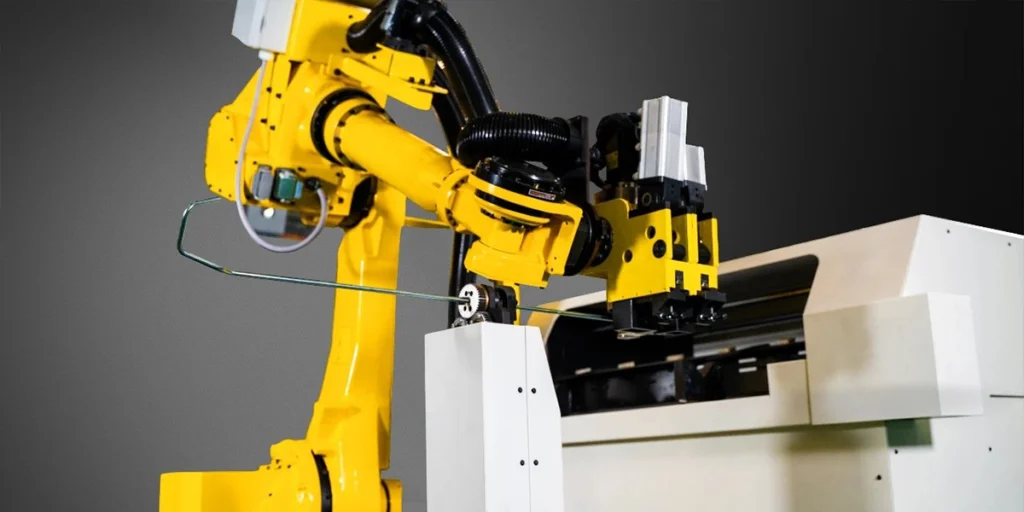
В роботизированных манипуляторах точность — это не один показатель, а результат совместной работы множества компонентов. Каждый шарнир, каждая сопрягаемая поверхность и каждая передаточная конструкция влияют на конечную производительность.
Для шарнирных роботизированных манипуляторов точность обработки напрямую зависит от:
- Стабильна ли траектория движения?
- Согласуются ли повторяющиеся местоположения?
- Насколько он надежен при длительной эксплуатации?
Практическое значение погрешности ±0,02 мм в роботизированных манипуляторах
В прецизионной обработке погрешность ±0,02 мм находится в пределах стандартного диапазона высокой точности, но в конструкции роботизированной руки это значение имеет гораздо большее значение, чем просто контроль размеров.
Рассмотрим в качестве примера типичную конструкцию соединения:
- Погрешность посадки между валом и подшипником
- Плоскостность поверхности крепления редуктора
- Соосность корпуса соединения
Если контроль этих критически важных компонентов осуществляется в пределах ±0,02 мм, это может эффективно гарантировать:
- Шарниры двигаются плавно, без явных заеданий или ослабления.
- Стабильная система передачи, снижающая вибрацию и шум.
- При соединении нескольких суставов необходимо поддерживать единообразие.
Что еще более важно, в роботизированных манипуляторах с несколькими степенями свободы такое точное управление может значительно уменьшить эффект усиления, вызванный накоплением ошибок.
Наши производственные мощности
При обработке деталей для роботов мы неизменно поддерживали точность критических размеров в пределах ±0,02 мм, уделяя особое внимание следующим параметрам:
- Совместное крепление и монтажная конструкция
- Валы и сопрягаемые детали
- Высокоточная соединительная поверхность и позиционирующая структура.
Благодаря многоосевой обработке на станках с ЧПУ и стабильному управлению технологическим процессом мы обеспечиваем единообразие размеров и геометрических допусков каждой партии деталей, создавая надежную основу для сборки роботизированной руки.

Влияние кумулятивной ошибки на точность роботизированных манипуляторов.
В шарнирных роботизированных манипуляторах проблемы с точностью обычно вызваны не одной деталью, а совокупными ошибками множества компонентов.
Каждая обработанная деталь имеет определенные допуски, например:
- Погрешность посадки между валом и подшипником
- Отклонение плоскостности поверхности соединения при монтаже
- Погрешность позиционирования между структурными компонентами
Эти ошибки могут быть незначительными в отдельной детали, но они распространяются и усиливаются шаг за шагом в многосоставной конструкции.
В практических конструкциях путь распространения ошибки обычно выглядит следующим образом:
- Начиная с основания
- Проходящий через плечевой и локтевой суставы.
- Затем к запястью
- В конечном итоге, он воздействует на концевой эффектор.
По мере увеличения количества суставов ошибки накапливаются, в конечном итоге проявляясь следующим образом:
- Смещение конечного положения
- Сниженная воспроизводимость
- Нестабильная траектория
Рассмотрим в качестве примера обычный 6-осевой роботизированный манипулятор. Даже если точность каждого ключевого компонента контролируется в пределах ±0,02 мм, недостаточная согласованность сборки или локальные колебания точности могут в конечном итоге привести к более очевидным ошибкам.
Именно поэтому в робототехнике требуется не только точность отдельных деталей, но и гарантирование следующих параметров:
- Стабильность партии
- Критическая стабильность размеров
- Точность соответствия сборки
В реальном производстве контроль ошибок обычно сосредоточен на критически важных деталях:
- Конструкция соединительного элемента
- интерфейс крепления коробки передач
- Многогранная точка позиционирования
- Длинные конструктивные элементы
Если эти параметры отклонятся, это напрямую повлияет на общую производительность машины, и впоследствии будет сложно полностью скорректировать их с помощью системы управления.

Как обеспечить единообразие деталей робота
В робототехнике достижение необходимой точности отдельных деталей является лишь основой; гораздо более важным аспектом является контроль стабильности при массовом производстве.
Если в одной партии имеются различия между деталями, даже если точность отдельной детали приемлема, эти различия все равно проявятся после сборки.
- Неравномерная посадка и плотность прилегания.
- Изменения сопротивления движению в суставах
- Колебания повторяемости
Таким образом, контроль стабильности является одним из ключевых факторов, влияющих на производительность роботизированных манипуляторов.
В реальных условиях согласованность в основном обеспечивается следующими аспектами:
- Стабильность процесса обработки: фиксированные параметры обработки и траектории движения инструмента снижают вероятность ошибок, вызванных человеческим фактором.
- Контроль точности оборудования: Долговременная стабильность точности многоосевого оборудования с ЧПУ.
- Стандартизированная базовая точка: критические размеры обрабатываются с использованием единой позиционирующей базовой точки.
- Единые стандарты тестирования: ключевые размеры и геометрические допуски контролируются на протяжении всего процесса.
Для ключевых компонентов роботов обычно требуется особое внимание к управлению:
- Последовательность размеров соединения
- Относительная точность позиционирования нескольких монтажных поверхностей
- Соосность и округлость деталей вала
- Диапазон отклонений размеров между партиями деталей
Эти показатели напрямую влияют на общую производительность после сборки.
Как мы обеспечиваем единообразие процессов обработки?
При производстве деталей для роботов мы обеспечиваем стабильное серийное производство за счет стандартизированных процессов и контроля качества:
- Контроль критических размеров осуществляется в пределах ±0,02 мм.
- Поддерживайте неизменные параметры процесса на протяжении нескольких партий обработки.
- Стандартизация обработки деталей для уменьшения ошибок при сборке.
- Полный контроль качества на всех этапах производства обеспечивает стабильный результат в каждой партии.
Применимо к:
- Совместные конструктивные элементы
- Компоненты трансмиссии и сопряжения
- Высокоточная монтажная конструкция
Высокоточная роботизированная обработка деталей
Если вам требуется обработка деталей шарнирных манипуляторов роботов, мы можем предоставить вам стабильные и надежные услуги по высокоточной обработке на станках с ЧПУ . Мы обладаем обширным опытом в обработке конструкционных деталей роботов и компонентов трансмиссии, а ключевые размеры могут быть стабильно контролированы в пределах ±0,02 мм.
Она поддерживает все этапы производства, от прототипирования до массового выпуска, обеспечивая надежную работу с точки зрения точности и стабильности для каждой партии деталей.
Если вы работаете над проектом в области робототехники, вы можете напрямую отправить свои чертежи или требования, и мы предоставим вам план обработки и коммерческое предложение.