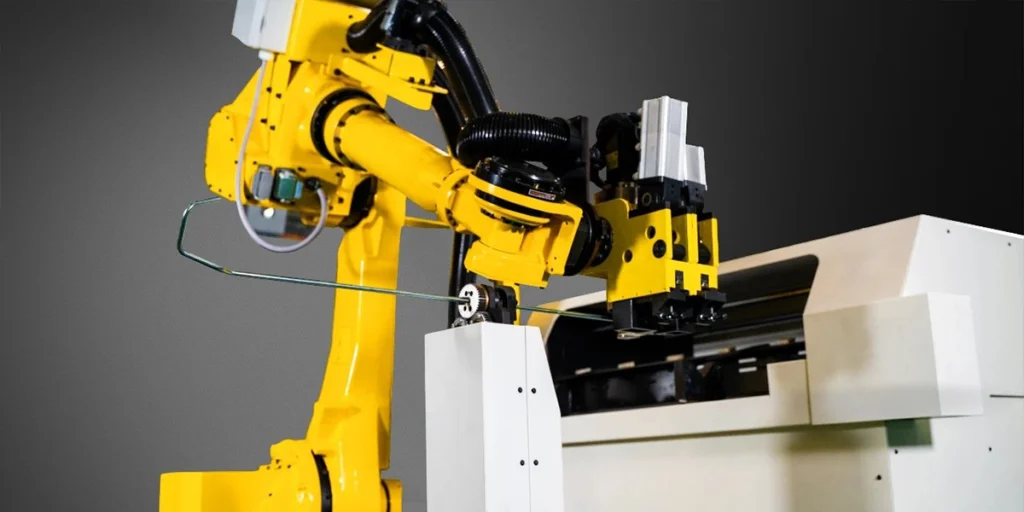
ในแขนหุ่นยนต์ ความแม่นยำไม่ได้เป็นเพียงตัวชี้วัดเดียว แต่เป็นผลลัพธ์จากการทำงานร่วมกันของส่วนประกอบหลายอย่าง ข้อต่อทุกข้อ พื้นผิวสัมผัสทุกส่วน และโครงสร้างการส่งกำลังทุกส่วน ล้วนส่งผลต่อประสิทธิภาพโดยรวม
สำหรับแขนหุ่นยนต์แบบข้อต่อ ความแม่นยำในการผลิตชิ้นส่วนมีความสัมพันธ์โดยตรงกับ:
- เส้นทางการเคลื่อนที่นั้นมีเสถียรภาพหรือไม่?
- ตำแหน่งที่ซ้ำกันมีความสอดคล้องกันหรือไม่?
- มันใช้งานได้น่าเชื่อถือในระยะยาวหรือไม่?
ความสำคัญในทางปฏิบัติของค่าความคลาดเคลื่อน ±0.02 มม. ในแขนหุ่นยนต์
ในการผลิตชิ้นส่วนที่มีความแม่นยำสูง ค่าความคลาดเคลื่อน ±0.02 มม. ถือว่าอยู่ในช่วงมาตรฐานของความแม่นยำสูง แต่ในโครงสร้างของแขนหุ่นยนต์ ค่านี้มีความสำคัญมากกว่าแค่การควบคุมมิติ
ยกตัวอย่างเช่น โครงสร้างข้อต่อทั่วไป:
- ความคลาดเคลื่อนในการประกอบระหว่างเพลาและแบริ่ง
- ความเรียบของพื้นผิวติดตั้งเกียร์
- ความตรงแนวแกนของตัวเรือนข้อต่อ
หากส่วนประกอบที่สำคัญเหล่านี้ได้รับการควบคุมให้อยู่ภายในช่วง ±0.02 มม. จะสามารถรับประกันได้อย่างมีประสิทธิภาพว่า:
- ข้อต่อต่างๆ เคลื่อนไหวได้อย่างราบรื่นโดยไม่มีการติดขัดหรือหลวมอย่างเห็นได้ชัด
- ระบบส่งกำลังที่เสถียร ช่วยลดการสั่นสะเทือนและเสียงรบกวน
- รักษาความสม่ำเสมอเมื่อเชื่อมต่อข้อต่อหลายจุดเข้าด้วยกัน
ที่สำคัญกว่านั้น ในแขนหุ่นยนต์ที่มีองศาอิสระหลายระดับ การควบคุมที่แม่นยำนี้สามารถลดผลกระทบจากการสะสมข้อผิดพลาดได้อย่างมีนัยสำคัญ
ความสามารถในการประมวลผลของเรา
ในการผลิตชิ้นส่วนหุ่นยนต์ เราได้รักษาความแม่นยำของขนาดที่สำคัญให้อยู่ภายใน ±0.02 มม. อย่างสม่ำเสมอ โดยมุ่งเน้นที่:
- โครงสร้างตัวเรือนและการติดตั้งร่วมกัน
- เพลาและชิ้นส่วนที่ประกบกัน
- พื้นผิวเชื่อมต่อที่มีความแม่นยำสูงและโครงสร้างการกำหนดตำแหน่ง
ด้วยการใช้เครื่องจักร CNC แบบหลายแกนและการควบคุมกระบวนการที่เสถียร เราจึงมั่นใจได้ว่าชิ้นส่วนแต่ละชุดจะมีขนาดและความคลาดเคลื่อนทางเรขาคณิตที่สม่ำเสมอ ซึ่งเป็นรากฐานที่มั่นคงสำหรับการประกอบแขนหุ่นยนต์

ผลกระทบของข้อผิดพลาดสะสมต่อความแม่นยำของแขนหุ่นยนต์
ในแขนหุ่นยนต์แบบข้อต่อ ปัญหาเรื่องความแม่นยำมักไม่ได้เกิดจากชิ้นส่วนเพียงชิ้นเดียว แต่เกิดจากข้อผิดพลาดสะสมของชิ้นส่วนหลายชิ้น
ชิ้นส่วนที่ผ่านกระบวนการกลึงทุกชิ้นจะมีค่าความคลาดเคลื่อนอยู่บ้าง ตัวอย่างเช่น:
- ความคลาดเคลื่อนในการประกอบระหว่างเพลาและแบริ่ง
- ความเบี่ยงเบนของความเรียบของพื้นผิวการติดตั้งข้อต่อ
- ความคลาดเคลื่อนเชิงตำแหน่งระหว่างส่วนประกอบโครงสร้าง
ข้อผิดพลาดเหล่านี้อาจมีขนาดเล็กในชิ้นส่วนเดียว แต่จะแพร่กระจายและขยายใหญ่ขึ้นทีละขั้นตอนในโครงสร้างที่มีข้อต่อหลายจุด
ในโครงสร้างเชิงปฏิบัติ เส้นทางการแพร่กระจายของข้อผิดพลาดโดยทั่วไปจะเป็นดังนี้:
- เริ่มต้นจากฐาน
- โดยผ่านข้อต่อไหล่และข้อต่อข้อศอก
- จากนั้นไปที่ข้อมือ
- โดยสรุปแล้ว มันจะออกฤทธิ์ที่ส่วนปลายของแขนกล
เมื่อจำนวนข้อต่อเพิ่มขึ้น ข้อผิดพลาดก็จะสะสมมากขึ้น จนในที่สุดจะปรากฏออกมาในรูปแบบดังต่อไปนี้:
- การชดเชยตำแหน่งสุดท้าย
- ความสามารถในการทำซ้ำลดลง
- วิถีที่ไม่เสถียร
ยกตัวอย่างเช่น แขนหุ่นยนต์ 6 แกนทั่วไป แม้ว่าส่วนประกอบสำคัญแต่ละชิ้นจะถูกควบคุมภายใน ±0.02 มม. แต่ความสม่ำเสมอในการประกอบที่ไม่เพียงพอหรือความผันผวนของความแม่นยำในระดับท้องถิ่นอาจขยายใหญ่ขึ้นจนกลายเป็นข้อผิดพลาดที่เห็นได้ชัดเจนมากขึ้นในตอนท้าย
ด้วยเหตุนี้ ในการผลิตหุ่นยนต์ จึงไม่เพียงแต่ต้องการความแม่นยำของชิ้นส่วนแต่ละชิ้นเท่านั้น แต่ยังต้องรับประกันสิ่งต่อไปนี้ด้วย:
- ความสม่ำเสมอของชุดการผลิต
- เสถียรภาพมิติวิกฤต
- ความแม่นยำในการประกอบตรงกัน
ในการผลิตจริง การควบคุมข้อผิดพลาดมักจะมุ่งเน้นไปที่ชิ้นส่วนที่สำคัญ:
- โครงสร้างข้อต่อ
- ส่วนต่อประสานการติดตั้งเกียร์
- ข้อมูลอ้างอิงตำแหน่งแบบหลายแง่มุม
- ส่วนประกอบโครงสร้างยาว
หากตำแหน่งเหล่านี้เบี่ยงเบนไป จะส่งผลกระทบโดยตรงต่อประสิทธิภาพโดยรวมของเครื่องจักร และจะเป็นเรื่องยากที่จะแก้ไขให้ถูกต้องทั้งหมดผ่านระบบควบคุมในภายหลัง

วิธีการตรวจสอบให้แน่ใจว่าชิ้นส่วนหุ่นยนต์มีความสม่ำเสมอ
ในการผลิตด้วยหุ่นยนต์ การบรรลุความแม่นยำที่ต้องการสำหรับชิ้นส่วนแต่ละชิ้นเป็นเพียงพื้นฐานเท่านั้น สิ่งที่สำคัญกว่าคือการควบคุมความสม่ำเสมอในระหว่างการผลิตจำนวนมาก
หากชิ้นส่วนในล็อตเดียวกันมีความแตกต่างกัน แม้ว่าความแม่นยำของชิ้นส่วนแต่ละชิ้นจะอยู่ในระดับที่ยอมรับได้ ความแตกต่างเหล่านี้ก็จะยังคงเกิดขึ้นหลังจากการประกอบ
- ความพอดีและความแน่นที่ไม่สม่ำเสมอ
- การเปลี่ยนแปลงความต้านทานการเคลื่อนไหวของข้อต่อ
- ความผันผวนในความสามารถในการทำซ้ำ
ดังนั้น การควบคุมความสม่ำเสมอจึงเป็นหนึ่งในปัจจัยสำคัญที่ส่งผลต่อประสิทธิภาพการทำงานของแขนหุ่นยนต์
ในการประมวลผลจริง ความสม่ำเสมอส่วนใหญ่มาจากปัจจัยต่อไปนี้:
- ความเสถียรของกระบวนการตัดเฉือน: การกำหนดค่าพารามิเตอร์การตัดเฉือนและเส้นทางการเคลื่อนที่ของเครื่องมืออย่างคงที่ ช่วยลดความผันผวนของข้อผิดพลาดจากมนุษย์
- การควบคุมความแม่นยำของอุปกรณ์: ความเสถียรของความแม่นยำในระยะยาวของอุปกรณ์ CNC หลายแกน
- จุดอ้างอิงมาตรฐาน: ขนาดที่สำคัญจะถูกขึ้นรูปโดยใช้จุดอ้างอิงตำแหน่งที่เป็นมาตรฐานเดียวกัน
- มาตรฐานการทดสอบที่สม่ำเสมอ: ขนาดที่สำคัญและค่าความคลาดเคลื่อนทางเรขาคณิตจะได้รับการตรวจสอบตลอดกระบวนการทั้งหมด
สำหรับส่วนประกอบสำคัญของหุ่นยนต์ การควบคุมมักต้องได้รับการดูแลเป็นพิเศษ:
- ความสม่ำเสมอของขนาดการประกอบข้อต่อ
- ความแม่นยำเชิงตำแหน่งสัมพัทธ์ของพื้นผิวการติดตั้งหลายจุด
- ความตรงแกนและความกลมของชิ้นส่วนเพลา
- ความคลาดเคลื่อนของขนาดระหว่างชิ้นส่วนแต่ละล็อต
ตัวชี้วัดเหล่านี้ส่งผลโดยตรงต่อประสิทธิภาพโดยรวมหลังการประกอบ
เราจะมั่นใจได้อย่างไรว่ากระบวนการมีความสม่ำเสมอ?
ในการผลิตชิ้นส่วนหุ่นยนต์ เรามั่นใจได้ว่าการผลิตเป็นไปอย่างต่อเนื่องและเป็นชุด โดยใช้กระบวนการที่เป็นมาตรฐานและการควบคุมคุณภาพ:
- ขนาดที่สำคัญจะถูกควบคุมให้อยู่ภายในช่วง ±0.02 มม.
- รักษาค่าพารามิเตอร์กระบวนการให้คงที่ในกระบวนการผลิตหลายชุด
- การผลิตด้วยเครื่องจักรที่เป็นมาตรฐานเพื่อลดข้อผิดพลาดในการประกอบ
- การตรวจสอบคุณภาพตลอดกระบวนการผลิต เพื่อให้มั่นใจได้ว่าผลผลิตในแต่ละล็อตมีความเสถียร
ใช้ได้กับ:
- ส่วนประกอบโครงสร้างร่วม
- ส่วนประกอบระบบส่งกำลังและการเชื่อมต่อ
- โครงสร้างการติดตั้งที่มีความแม่นยำสูง
การผลิตชิ้นส่วนหุ่นยนต์ที่มีความแม่นยำสูง
หากคุณต้องการชิ้นส่วนแขนหุ่นยนต์แบบข้อต่อ เราสามารถให้บริการการผลิตด้วยเครื่อง CNC ที่มีความแม่นยำสูงและสม่ำเสมอ ได้ เรามีประสบการณ์มากมายในการผลิตชิ้นส่วนโครงสร้างหุ่นยนต์และชิ้นส่วนระบบส่งกำลัง และสามารถควบคุมขนาดที่สำคัญได้อย่างเสถียรภายใน ±0.02 มม.
ระบบนี้รองรับทุกอย่างตั้งแต่การสร้างต้นแบบไปจนถึงการผลิตจำนวนมาก ช่วยให้มั่นใจได้ถึงประสิทธิภาพที่เชื่อถือได้ในแง่ของความแม่นยำและความสม่ำเสมอสำหรับชิ้นส่วนทุกชุด
หากคุณกำลังทำงานในโครงการหุ่นยนต์ คุณสามารถส่งแบบร่างหรือข้อกำหนดของคุณมาให้เราได้โดยตรง และเราจะจัดทำแผนการดำเนินงานและใบเสนอราคาให้คุณ