
แขนหุ่นยนต์แบบข้อต่อประกอบด้วยชิ้นส่วนทางกลและระบบส่งกำลังหลายชิ้น ซึ่งแต่ละชิ้นทำหน้าที่แตกต่างกัน และเมื่อรวมกันแล้วจะกำหนดความสามารถในการเคลื่อนที่ ความแม่นยำ และเสถียรภาพโดยรวมของเครื่องจักร
โดยทั่วไปแล้ว แขนหุ่นยนต์จะมีโครงสร้างหลักประกอบด้วยส่วนประกอบสำคัญดังต่อไปนี้:
- ระบบข้อต่อ (ข้อไหล่ ข้อศอก ข้อข้อมือ)
- การเชื่อมต่อและส่วนประกอบโครงสร้าง
- เกียร์และระบบส่งกำลัง
- ปลายแขนกล
- เซ็นเซอร์และโครงสร้างการติดตั้ง
ส่วนประกอบเหล่านี้ประกอบกันเป็นห่วงโซ่จลศาสตร์ที่สมบูรณ์ ซึ่งทำให้กระบวนการทั้งหมดตั้งแต่การป้อนพลังงานไปจนถึงการทำงานของปลายแขนกลเกิดขึ้นได้จริง
ระบบข้อต่อ (ข้อไหล่ ข้อศอก ข้อข้อมือ)
ข้อต่อเป็นหน่วยการเคลื่อนไหวหลักของแขนหุ่นยนต์ ข้อต่อแต่ละข้อให้องศาการหมุน และการเคลื่อนไหวที่ซับซ้อนเกิดขึ้นได้จากการรวมกันของข้อต่อหลายๆ ข้อ
โดยทั่วไปจัดอยู่ในประเภท:
- ข้อต่อหัวไหล่: ทำหน้าที่เชื่อมต่อฐานกับต้นแขน รับน้ำหนักของเครื่องจักรทั้งหมด และเป็นส่วนประกอบที่รับน้ำหนักสูง
- ข้อศอก: เป็นข้อต่อระหว่างต้นแขนและปลายแขน ทำหน้าที่ขยายช่วงการเคลื่อนไหว
- ข้อต่อข้อมือ: ตั้งอยู่บริเวณปลายข้อมือ ทำหน้าที่หลักในการปรับท่าทางและทักษะการเคลื่อนไหวของกล้ามเนื้อมืออย่างละเอียด
โดยทั่วไปแล้ว ข้อต่อต่างๆ จะถูกประกอบเข้ากับ:
- มอเตอร์ไฟฟ้า
- ตัวลดเกียร์
- ระบบแบริ่ง
- โครงสร้างผลลัพธ์
ลักษณะโครงสร้างของมันมีดังนี้:
- การบูรณาการระดับสูง
- ความพอดีที่แม่นยำสูง
- ข้อกำหนดที่เข้มงวดสำหรับความตรงแนวแกนและความแม่นยำในการประกอบ
ในการใช้งานจริง ส่วนที่เชื่อมต่อกันจะส่งผลโดยตรงต่อ:
- ความแม่นยำในการเคลื่อนไหว
- ความสามารถในการทำซ้ำ
- เสถียรภาพโดยรวม
ดังนั้น ชิ้นส่วนที่เกี่ยวข้องกับข้อต่อจึงมักเป็นชิ้นส่วนที่ต้องการความแม่นยำในการผลิตสูงที่สุดสำหรับแขนหุ่นยนต์
ระบบข้อต่อเป็นตัวกำหนด “วิธีการเคลื่อนที่ของแขนหุ่นยนต์” และเป็นส่วนที่สำคัญและซับซ้อนที่สุดของเครื่องจักรทั้งหมด ประสิทธิภาพของมันขึ้นอยู่กับไม่เพียงแต่การออกแบบเท่านั้น แต่ยังขึ้นอยู่กับความแม่นยำในการผลิตและการประกอบชิ้นส่วนที่มีคุณภาพด้วย

โครงสร้างเชื่อมต่อและโครงหลัก
โครงสร้างข้อต่อเป็นส่วนหลักของแขนหุ่นยนต์ ใช้สำหรับเชื่อมต่อข้อต่อต่างๆ และส่งกำลังจากข้อต่อหนึ่งไปยังอีกข้อต่อหนึ่ง
โดยทั่วไปแล้ว โครงสร้างของก้านเชื่อมต่อจะประกอบด้วย:
- ต้นแขน
- แขนท่อนล่าง
- แผ่นเชื่อมต่อและโครงสร้างรองรับต่างๆ
ส่วนประกอบเหล่านี้รวมกันเป็นโครงสร้างหลักของแขนหุ่นยนต์ ซึ่งเป็นตัวกำหนดความแข็งแรงโดยรวมและช่วงการทำงานของแขนหุ่นยนต์
ลักษณะโครงสร้าง
เมื่อเปรียบเทียบกับระบบข้อต่อ โครงสร้างแบบเชื่อมโยงไม่ได้ทำหน้าที่ขับเคลื่อน แต่ก็มีความสำคัญไม่แพ้กันต่อประสิทธิภาพโดยรวมของเครื่องจักร
- มันต้องมีความแข็งแรงและทนทานเพียงพอ
- ในขณะเดียวกัน ควรลดน้ำหนักให้น้อยที่สุดเท่าที่จะเป็นไปได้ (ลดแรงเฉื่อย)
- ช่วยป้องกันการเสียรูปทรงระหว่างการใช้งานในระยะยาว
โดยทั่วไปการออกแบบจะใช้องค์ประกอบดังต่อไปนี้:
- โครงสร้างกลวงหรือการออกแบบซี่โครงเสริมแรง
- วัสดุน้ำหนักเบา (เช่น โลหะผสมอะลูมิเนียม)
- โครงสร้างแบบบูรณาการช่วยลดข้อผิดพลาดในการประกอบ
ผลกระทบต่อความแม่นยำ
คุณภาพการผลิตชิ้นส่วนโครงสร้างเชื่อมต่อส่งผลโดยตรงต่อความแม่นยำโดยรวมของแขนหุ่นยนต์ ตัวอย่างเช่น:
- ความคลาดเคลื่อนในเรื่องความขนานและความตั้งฉากอาจนำไปสู่ข้อผิดพลาดในวิถีการเคลื่อนที่
- ความแข็งแรงของโครงสร้างที่ไม่เพียงพออาจทำให้เกิดการเสียรูปเล็กน้อยภายใต้แรงกด
- การเชื่อมโยงหลายขั้นตอนจะยิ่งทำให้ข้อผิดพลาดสะสมเพิ่มมากขึ้น
ปัญหาเหล่านี้จะส่งผลต่อความแม่นยำในการกำหนดตำแหน่งของปลายแขนหุ่นยนต์ในที่สุด
ข้อกำหนดในการประมวลผล
โดยทั่วไปแล้ว ชิ้นส่วนก้านสูบจะมีลักษณะการขึ้นรูปด้วยเครื่องจักรดังต่อไปนี้:
- มีขนาดใหญ่ขึ้น แต่ต้องการความแม่นยำที่คงที่
- การขึ้นรูปชิ้นงานหลายด้าน (ต้องใช้การทำงานหลายแกนหรือการจับยึดหลายจุด)
- มีพื้นผิวสำหรับติดตั้งและรูสำหรับเชื่อมต่ออยู่หลายจุด
จุดควบคุมที่สำคัญ ได้แก่:
- ความแม่นยำของตำแหน่งรูและความแม่นยำเชิงตำแหน่ง
- ความเรียบของพื้นผิวการติดตั้ง
- ความสอดคล้องของโครงสร้างโดยรวม
ดังนั้น จะเห็นได้ว่าถึงแม้โครงสร้างข้อต่อเองจะไม่เกี่ยวข้องกับการขับเคลื่อน แต่ก็เป็นตัวกำหนดความแข็งแกร่งของแขนหุ่นยนต์และความสามารถในการส่งกำลังที่แม่นยำ คุณภาพการผลิตของโครงสร้างข้อต่อส่งผลโดยตรงต่อเสถียรภาพและประสิทธิภาพในระยะยาวของเครื่องจักรทั้งหมด

เกียร์และระบบส่งกำลัง
เฟืองและระบบส่งกำลังใช้ในการส่งกำลังภายในแขนหุ่นยนต์และแปลงความเร็วและแรงบิด เป็นส่วนประกอบสำคัญที่เชื่อมต่อมอเตอร์กับโครงสร้างที่เคลื่อนที่ได้จริง
ในแขนหุ่นยนต์แบบข้อต่อ วิธีการส่งกำลังที่ใช้กันทั่วไป ได้แก่:
- ระบบเกียร์
- โครงสร้างการส่งผ่านดาวเคราะห์
- ส่วนประกอบการส่งกำลังภายในของตัวลดเกียร์ (RV, ฮาร์โมนิกส์)
โดยทั่วไปแล้ว โครงสร้างเหล่านี้จะถูกรวมเข้าไว้ภายในข้อต่อ ทำให้เกิดเป็นชุดขับเคลื่อนที่สมบูรณ์ร่วมกับมอเตอร์และเพลาส่งกำลัง
ลักษณะโครงสร้าง
หน้าที่หลักของระบบส่งกำลังคือ:
- แปลงกำลังส่งจากมอเตอร์ให้เป็นแรงบิดที่เหมาะสมสำหรับการใช้งานกับข้อต่อ
- ตรวจสอบให้แน่ใจว่ากระบวนการเคลื่อนไหวเป็นไปอย่างราบรื่นและควบคุมได้
- ลดการสั่นสะเทือนและการสูญเสียพลังงาน
ดังนั้น ส่วนประกอบประเภทนี้จึงมักมีลักษณะดังต่อไปนี้:
- ข้อกำหนดการสร้างตาข่ายที่มีความแม่นยำสูง
- ข้อกำหนดคุณภาพพื้นผิวระดับสูง
- ความทนทานต่อการสึกหรอระหว่างการใช้งานในระยะยาว
ผลกระทบต่อประสิทธิภาพการทำงานของแขนหุ่นยนต์
คุณภาพของระบบส่งกำลังส่งผลโดยตรงต่อประสิทธิภาพการทำงานของแขนหุ่นยนต์ ตัวอย่างเช่น:
- ความผิดพลาดของเกียร์อาจทำให้การส่งกำลังไม่สม่ำเสมอ
- ช่องว่างที่มากเกินไปอาจส่งผลต่อความแม่นยำในการกำหนดตำแหน่ง
- การเข้าเกียร์ที่ไม่แน่นหนาอาจทำให้เกิดการสั่นสะเทือนและเสียงดังได้
ในระบบที่มีข้อต่อหลายจุด ปัญหาเหล่านี้จะทวีความรุนแรงขึ้นในแต่ละขั้นตอน ส่งผลกระทบต่อความแม่นยำในการทำงานของปลายแขนหุ่นยนต์ในที่สุด
ข้อกำหนดด้านการประมวลผลและการผลิต
เฟืองและชิ้นส่วนระบบส่งกำลังเป็นชิ้นส่วนที่มีความแม่นยำสูง ซึ่งต้องใช้มาตรฐานการผลิตที่สูง
- ความแม่นยำของรูปทรงฟันและความแม่นยำในการประกบฟัน
- การควบคุมความตรงแกนและความกลม
- ความคงตัวของมิติหลังการอบชุบด้วยความร้อน
- การควบคุมความหยาบของพื้นผิว
ในขณะเดียวกัน ชิ้นส่วนประเภทนี้มักต้องการ:
- กระบวนการกลึงและเจียรที่แม่นยำ
- การควบคุมความคลาดเคลื่อนอย่างเข้มงวด
- ความสม่ำเสมอของชุดการผลิตที่คงที่
ดังนั้น จะเห็นได้ว่าเฟืองและระบบส่งกำลังเป็นตัวกำหนดความเสถียรและความแม่นยำในการส่งกำลัง และเป็นหนึ่งในรากฐานสำคัญของประสิทธิภาพการทำงานของแขนหุ่นยนต์ คุณภาพการผลิตของเฟืองและระบบส่งกำลังส่งผลโดยตรงต่อความแม่นยำ ระดับเสียง และอายุการใช้งานของแขนหุ่นยนต์

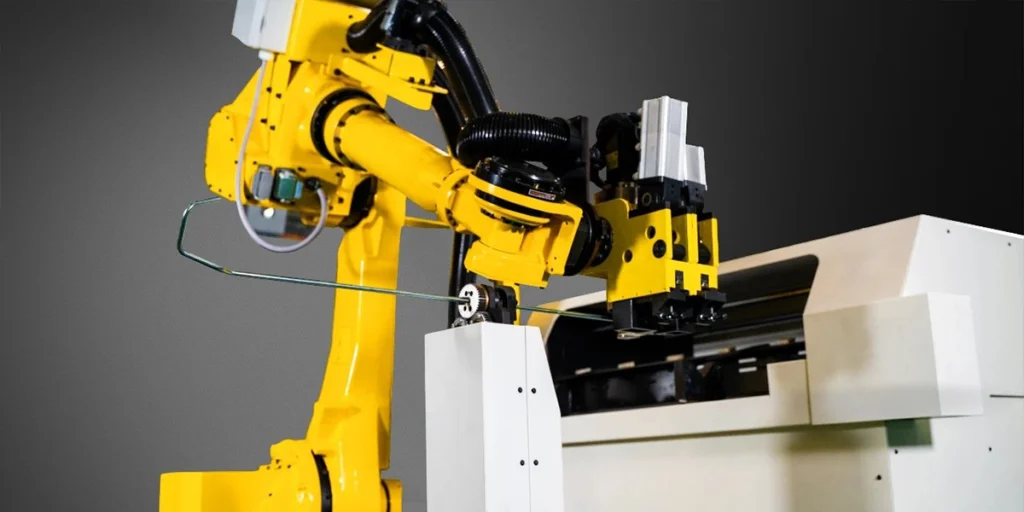
ปลายแขนกล
ส่วนปลายแขนหุ่นยนต์ (End effector) คือส่วนของแขนหุ่นยนต์ที่สัมผัสกับชิ้นงานโดยตรงและใช้ในการทำงานเฉพาะอย่าง เป็นส่วนสุดท้ายในการทำให้แขนหุ่นยนต์ทำงานได้อย่างสมบูรณ์
ขึ้นอยู่กับสถานการณ์การใช้งาน อุปกรณ์ปลายแขนมีหลายรูปแบบ โดยประเภทที่พบได้ทั่วไป ได้แก่:
- ตัวจับ (ใช้สำหรับจับและเคลื่อนย้าย)
- ตัวดูดสุญญากาศ (สำหรับเคลื่อนย้ายสิ่งของที่มีน้ำหนักเบา)
- อุปกรณ์เชื่อม (เช่น หัวเชื่อม)
- เครื่องมือเจียรและตัด
- เครื่องมือและอุปกรณ์จับยึดแบบสั่งทำพิเศษ
ลักษณะโครงสร้าง
โดยทั่วไปแล้ว ส่วนปลายของแขนกลจะมีลักษณะดังต่อไปนี้:
- การออกแบบที่ปรับแต่งให้เหมาะสมกับกระบวนการเฉพาะ
- ความถี่ในการเปลี่ยนสูง (ปรับใช้ได้กับงานต่างๆ)
- โครงสร้างที่ค่อนข้างกะทัดรัด
ในการใช้งานจริง อุปกรณ์ปลายแขนกลต้องคำนึงถึงสิ่งต่อไปนี้:
- ความสามารถในการใช้งานฟังก์ชัน
- การควบคุมน้ำหนัก (ส่งผลต่อภาระโดยรวมของเครื่องจักร)
- ติดตั้งและเปลี่ยนได้ง่าย
ผลกระทบต่อประสิทธิภาพการทำงานของแขนหุ่นยนต์
แม้ว่าส่วนปลายของแขนหุ่นยนต์จะอยู่ด้านท้ายสุดของระบบ แต่การออกแบบส่วนปลายนั้นส่งผลโดยตรงต่อประสิทธิภาพโดยรวมของแขนหุ่นยนต์:
- น้ำหนักตัวที่มากเกินไปจะเพิ่มภาระให้กับข้อต่อ
- ความไม่เสถียรของโครงสร้างอาจส่งผลต่อความแม่นยำ
- ข้อผิดพลาดในการติดตั้งอาจส่งผลให้ตำแหน่งคลาดเคลื่อนได้
โดยเฉพาะอย่างยิ่งในสถานการณ์การทำงานที่ต้องการความแม่นยำสูง คุณภาพการผลิตของหัวจับชิ้นงานจะเป็นตัวกำหนดผลลัพธ์ของการทำงานโดยตรง
ลักษณะการประมวลผล
โดยทั่วไปแล้ว อุปกรณ์ปลายแขนกล (End effector) เป็นชิ้นส่วนที่ผลิตขึ้นตามสั่ง และข้อกำหนดในการผลิตมีลักษณะดังต่อไปนี้:
- ส่วนใหญ่เป็นการผลิตจำนวนน้อยหรือชิ้นเดียว
- โครงสร้างซับซ้อน ส่วนใหญ่เป็นการออกแบบที่ไม่เป็นไปตามมาตรฐาน
- ต้องสร้างความสมดุลระหว่างความแข็งแรงและน้ำหนัก
จุดควบคุมที่สำคัญ ได้แก่:
- ความแม่นยำของอินเทอร์เฟซการติดตั้ง
- คุณภาพการประมวลผลพื้นผิวเชิงฟังก์ชัน
- ความสอดคล้องของโครงสร้างโดยรวม
ดังนั้น จะเห็นได้ว่าส่วนปลายของแขนหุ่นยนต์เป็นตัวกำหนดว่าแขนหุ่นยนต์ “ทำอะไร” แต่การออกแบบและคุณภาพการผลิตนั้นส่งผลโดยตรงต่อผลลัพธ์ของการใช้งานเฉพาะด้าน
ในกระบวนการผลิตจริง ชิ้นส่วนประเภทนี้มักต้องได้รับการปรับแต่งให้เหมาะสมกับกระบวนการเฉพาะ ซึ่งต้องการความยืดหยุ่นและความแม่นยำสูงในการผลิต
เซ็นเซอร์และโครงสร้างการติดตั้ง
เซ็นเซอร์ถูกใช้เพื่อเก็บรวบรวมข้อมูลสถานะต่างๆ ในระหว่างการทำงานของแขนหุ่นยนต์ และเป็นส่วนประกอบสำคัญในการควบคุมที่แม่นยำและการทำงานที่เสถียร
ประเภททั่วไป ได้แก่:
- ตัวเข้ารหัส (การป้อนข้อมูลตำแหน่งและมุม)
- เซ็นเซอร์แรง/แรงบิด
- ระบบวิชั่น (กล้อง)
- เซ็นเซอร์ตรวจจับระยะใกล้หรือตำแหน่ง
เซ็นเซอร์เหล่านี้ไม่ได้มีส่วนร่วมในการรองรับโครงสร้างโดยตรง แต่รูปแบบการติดตั้งส่งผลโดยตรงต่อความแม่นยำของข้อมูล
หน้าที่ของโครงสร้างการติดตั้ง
เพื่อให้เซ็นเซอร์ทำงานได้อย่างเสถียรและแม่นยำ มักจำเป็นต้องใช้โครงสร้างการติดตั้งแบบพิเศษ เช่น:
- ตัวยึดเซ็นเซอร์
- ฐานยึดและแผ่นเชื่อมต่อ
- โครงสร้างการปรับและจัดตำแหน่ง
โครงสร้างเหล่านี้จำเป็นต้องรับประกันสิ่งต่อไปนี้:
- ตำแหน่งการติดตั้งที่แม่นยำ
- ไม่มีความคลาดเคลื่อนเกิดขึ้นระหว่างการใช้งานในระยะยาว
- ไม่ได้รับผลกระทบจากการสั่นสะเทือนและการเสียรูป
ผลกระทบต่อความแม่นยำ
ความแม่นยำของเซ็นเซอร์ไม่ได้ขึ้นอยู่กับประสิทธิภาพของตัวเซ็นเซอร์เองเท่านั้น แต่ยังขึ้นอยู่กับคุณภาพของกระบวนการผลิตโครงสร้างติดตั้งด้วย
- พื้นผิวการติดตั้งที่ไม่เรียบอาจส่งผลต่อผลการวัด
- ความคลาดเคลื่อนของตำแหน่งอาจส่งผลให้ข้อมูลป้อนกลับไม่ถูกต้อง
- การหลวมของโครงสร้างอาจทำให้สัญญาณผันผวนได้
ในแขนหุ่นยนต์ที่มีความแม่นยำสูง ข้อผิดพลาดประเภทนี้จะถูกขยายให้ใหญ่ขึ้น ส่งผลกระทบต่อประสิทธิภาพการควบคุมโดยรวมในที่สุด
ข้อกำหนดในการประมวลผล
ส่วนประกอบสำหรับติดตั้งเซ็นเซอร์โดยทั่วไปมีลักษณะดังต่อไปนี้:
- มีขนาดเล็ก แต่ต้องการความแม่นยำสูง
- ข้อกำหนดที่เข้มงวดสำหรับพื้นผิวการติดตั้งและตำแหน่งรู
- ต้องมีความสม่ำเสมอที่ดีในการติดตั้งซ้ำหลายครั้ง
จุดควบคุมที่สำคัญ ได้แก่:
- ความแม่นยำของตำแหน่งรู
- ความเรียบของพื้นผิวการติดตั้ง
- ความเสถียรหลังการประกอบหลายครั้ง
แม้ว่าชิ้นส่วนเหล่านี้จะมีขนาดเล็ก แต่ก็มีผลกระทบโดยตรงต่อความแม่นยำและความเสถียรโดยรวมของแขนหุ่นยนต์

ผู้ผลิตชิ้นส่วนที่มีความแม่นยำสูงระดับมืออาชีพ
หากคุณมีความต้องการชิ้นส่วนที่เกี่ยวข้องกับแขนหุ่นยนต์ เราสามารถให้บริการการตัดเฉือน CNC ที่มีความแม่นยำสูง แก่คุณ ได้ เราเป็นผู้ผลิตชิ้นส่วนที่มีความแม่นยำสูงระดับมืออาชีพที่มีประสบการณ์มากมายในการตัดเฉือนชิ้นส่วนโครงสร้างหุ่นยนต์ ชิ้นส่วนข้อต่อ ระบบส่งกำลัง และชิ้นส่วนสั่งทำพิเศษต่างๆ
สำหรับชิ้นส่วนหลักทั้งหมดของแขนหุ่นยนต์ รวมถึงโครงสร้างข้อต่อ กลไกเชื่อมต่อ ระบบส่งกำลังแบบเฟือง ปลายแขน และฐานยึดเซ็นเซอร์ เราสามารถผลิตชิ้นส่วนเหล่านั้นได้ตามค่าความคลาดเคลื่อนและข้อกำหนดการประกอบที่เข้มงวด เพื่อให้มั่นใจในความแม่นยำ ความเสถียร และความสม่ำเสมอของชิ้นส่วน
เครื่องนี้รองรับวัสดุหลากหลายประเภท รวมถึงอะลูมิเนียมสแตนเลสเหล็กกล้าเครื่องมือ โลหะผสมไทเทเนียมและพลาสติกวิศวกรรมและสามารถส่งมอบผลิตภัณฑ์ได้อย่างเสถียรตั้งแต่การสร้างต้นแบบไปจนถึงการผลิตจำนวนมาก
หากคุณกำลังพัฒนาโครงการหุ่นยนต์ คุณสามารถส่งแบบร่างหรือข้อกำหนดของคุณมาให้เราได้โดยตรง และเราจะจัดหาโซลูชันการประมวลผลและใบเสนอราคาให้คุณ